Electrical Engineering - Online Test
Q1. The Taylor series expansion of 3 sin x + 2 cos x is
Answer : Option A
Explaination / Solution:
Given the function
f(x) = 3 sin x + 2 cos x
Now, we have the Taylor’s expansion for the trigonometric function as
Substituting it in equation (1), we get
Q2. For a function g (t), it is given that  for any real value 𝜔. If
for any real value 𝜔. If  is
is
for any real value 𝜔. If is
Answer : Option B
Explaination / Solution:
Given the relations

The Fourier transformation of f (t) is defined as
Now, from equation (2), we have
where u (t) is unit step function. Taking Fourier transform both the sides, we have
Q3. Let  The Region of Convergence (ROC) of the z -transform of x[n].
The Region of Convergence (ROC) of the z -transform of x[n].
The Region of Convergence (ROC) of the z -transform of x[n].
Answer : Option C
Explaination / Solution:
Given the discrete signal,
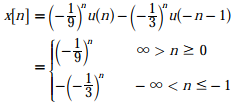
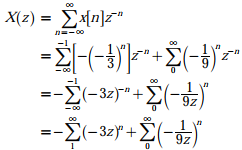
So, the z -transform of signal is obtained as
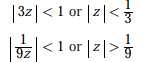
The above series converges, if
Combining the two inequalities, we get
(1/9) < |z| < (1/3)
This is the ROC of the z -transform
Q4. A system is described by the following differential equation, where u(t) is the input to the system and y(t) is the output of the system
y(t) + 5y(t) = u(t)
when y(t) = 1 and u(t) is a unit step function, y(t) is
Answer : Option A
Explaination / Solution:
Given the differential equation of the system
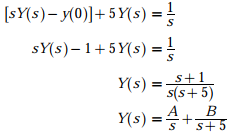
y(t) + 5y(t) = u(t)
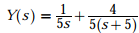
Applying Laplace transform both the sides,
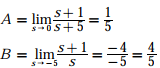
We obtain the constants A and B as
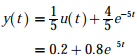
Substituting there values in equation (1), we get
Taking inverse Laplace transform, we get
Q5. Consider the state space model of a system, as given below
The system is
Answer : Option B
Explaination / Solution:
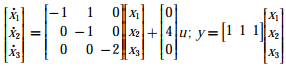
Given the state-space model of system
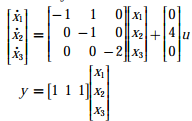

In standard form, we define the state space model as
[X] = A[X] + Bu
y = C[X] + Du
Comparing it to the given space model, we have the matrix
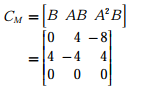
So, we obtain the controllability matrix as
Therefore, the rank of matrix CM is
Rank (CM) = 2 < 3 (order of system)
Hence, the system is uncontrollable
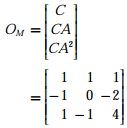
Again, we obtain the observability matrix as
Therefore, the rank of observability matrix is
Rank (OM) = 3 = order of system
Hence, the system is observable.
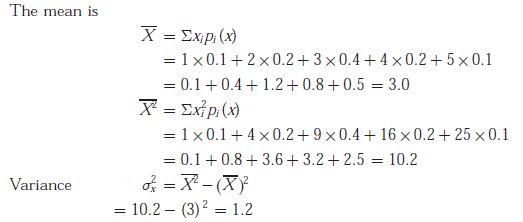
Q6. A discrete random variable X takes values from 1 to 5 with probabilities as shown in the table. A student calculates the mean X as 3.5 and her teacher calculates the variance of X as 1.5. Which of the following statements is true ?
Answer : Option B
Explaination / Solution:
Q7. Let X be a real-valued random variable with E[X] and E[X2] denoting the
mean values of X and X2 , respectively. The relation which always holds true is
Answer : Option B
Explaination / Solution:
No Explaination.
Q8. Consider a random process  where the random
phase
where the random
phase  is uniformly distributed in the interval [0, 2π]. The auto-correlation E[X(t1) X(t2)] is
is uniformly distributed in the interval [0, 2π]. The auto-correlation E[X(t1) X(t2)] is
where the random
phase
Answer : Option D
Explaination / Solution:
We have the random process



Where random phase ϕ is uniformly distributed in the interval [0, 2π]. So, we
obtain the probability density function as
fϕ(ϕ)= 1/2π
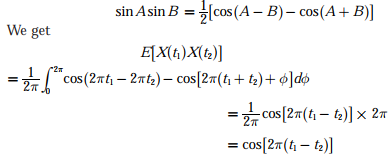
Therefore, the auto-correlation is given as
Using the trigonometric relation,
Q9.
The minimum eigen value of the following matrix is
Answer : Option A
Explaination / Solution:
For, a given matrix [A] the eigen value is calculated as  where
where  gives the eigen values of matrix. Here, the minimum eigen value among the given options is
gives the eigen values of matrix. Here, the minimum eigen value among the given options is  We check the characteristic equation of matrix for this eigen value
We check the characteristic equation of matrix for this eigen value
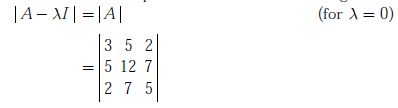

where We check the characteristic equation of matrix for this eigen value= 3(60 - 49h- 5(25 - 14)+ 2)35 - 24h
= 33 - 55 + 22
= 0
Hence, it satisfied the characteristic equation and so, the minimum eigen value is
Q10. A polynomial  with all coefficients positive has
with all coefficients positive has
with all coefficients positive has
Answer : Option D
Explaination / Solution:
Given, the polynomial 
Since, all the coefficients are positive so, the roots of equation is given by
f(x) = 0
It will have at least one pole in right hand plane as there will be least one sign change from (a1) to (a0) in the Routh matrix 1st column. Also, there will be a corresponding pole in left hand plane
i.e.; at least one positive root (in R.H.P)
and at least one negative root (in L.H.P)
Rest of the roots will be either on imaginary axis or in L.H.P