Electronics Engineering - Online Test
Q1. The z −transform X(z) of a sequence x n is given by X  It is given
that the region of convergence of X(z) includes the unit circle. The value of x is
It is given
that the region of convergence of X(z) includes the unit circle. The value of x is
It is given
that the region of convergence of X(z) includes the unit circle. The value of x is
Answer : Option B
Explaination / Solution:

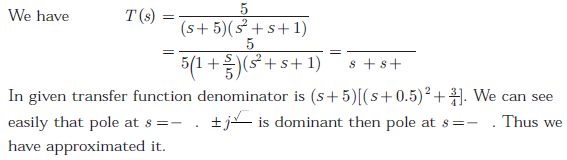
Q2. The transfer function of a plant is  The second-order approximation of T s using dominant pole concept is
The second-order approximation of T s using dominant pole concept is
The second-order approximation of T s using dominant pole concept is
Answer : Option D
Explaination / Solution:
Q3. In IC technology, dry oxidation (using dry oxygen) as compared to wet oxidation (using steam or water vapor) produces
Answer : Option D
Explaination / Solution:
In IC technology, dry oxidation as compared to wet oxidation produces superior quality oxide with a lower growth rate
Q4. 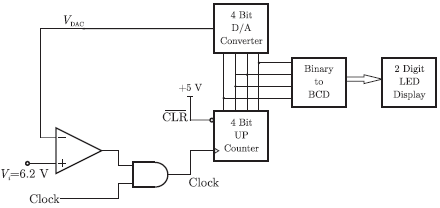
In the following circuit, the comparators output is logic “1” if V1 > V2 and is logic "0" otherwise. The D/A conversion is done as per the relation Volts, where b3 (MSB), b1,b2 and b0 (LSB) are the counter outputs. The counter starts from the clear state.
Volts, where b3 (MSB), b1,b2 and b0 (LSB) are the counter outputs. The counter starts from the clear state.
Volts, where b3 (MSB), b1,b2 and b0 (LSB) are the counter outputs. The counter starts from the clear state.The stable reading of the LED displays is
Answer : Option D
Explaination / Solution:
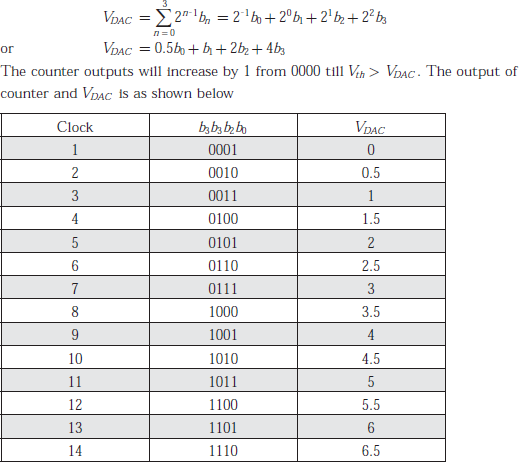
and when VADC = 6.5 V (at 1101), the output of AND is zero and the counter stops. The stable output of LED display is 13.
Q5. The RC circuit shown in the figure is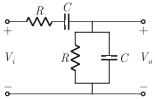
Answer : Option C
Explaination / Solution:
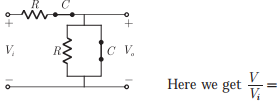
At ω⟶3, capacitor acts as short circuited and circuit acts as shown in fig below
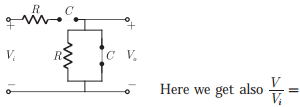
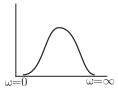
At ω⟶0, capacitor acts as open circuited and circuit look like as shown in fig
below
So frequency response of the circuit is as shown in fig and circuit is a Band pass
filter.
Q6. A half wavelength dipole is kept in the x-y plane and oriented along 450 from the x-axis. Determine the direction of null in the radiation pattern for 0 ≤ ϕ ≤ π. Here the angle θ (0 ≤ θ ≤ π) is measured from the z-axis, and the angle ϕ (0 ≤ ϕ ≤ 2π) is measured from the x-axis in the x-y plane.
Answer : Option A
Explaination / Solution:
The null occurs along axis of the antenna which is θ = 900and ϕ= 450
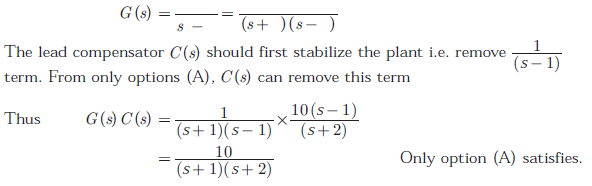
Q7. The open-loop transfer function of a plant is given as  If the plant is
operated in a unity feedback configuration, then the lead compensator that an
stabilize this control system is
If the plant is
operated in a unity feedback configuration, then the lead compensator that an
stabilize this control system is
If the plant is
operated in a unity feedback configuration, then the lead compensator that an
stabilize this control system is
Answer : Option A
Explaination / Solution:
Q8. Consider the signal  where
where  denotes the Hilbert transform of m(t) and the bandwidth of m(t) is very small compared to fc. The signal s(t) is a
denotes the Hilbert transform of m(t) and the bandwidth of m(t) is very small compared to fc. The signal s(t) is a
where
Answer : Option C
Explaination / Solution:
We have the signal,

Here, s(t) represents SSB - Lower side band, and thus a band pass signal.
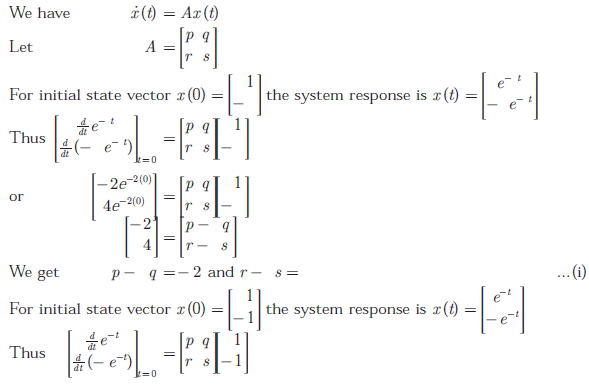
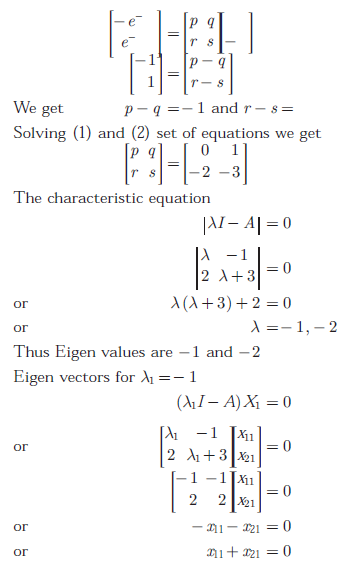
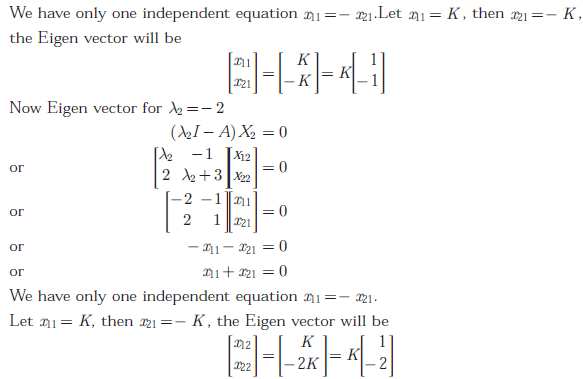
Q9. Consider a linear system whose state space representation is x(t) = Ax(t). If the initial state vector of the system is  then the system response is
then the system response is 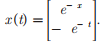 If the itial state vector of the system changes to the system response becomes
If the itial state vector of the system changes to the system response becomes 
then the system response is If the itial state vector of the system changes to the system response becomes The eigenvalue and eigenvector pairs (λivi)for the system are
Answer : Option A
Explaination / Solution:
Q10.
In a MOSFET operating in the saturation region, the channel length modulation effect causes
Answer : Option D
Explaination / Solution:
In a MOSFET operating in the saturation region, the channel length modulation effect causes a decrease in output resistance.