Control Systems - Online Test
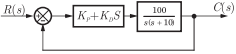
Q1. A control system with PD controller is shown in the figure. If the velocity error
constant KV = 000 and the damping ratio ζ = 0.5, then the value of KP and KD are
Answer : Option B
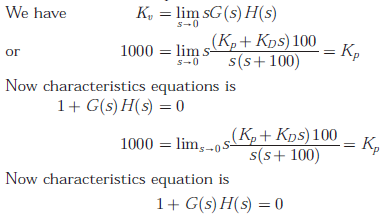
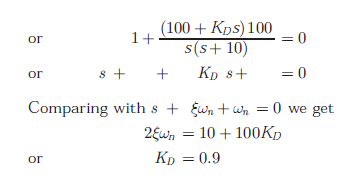
Explaination / Solution:
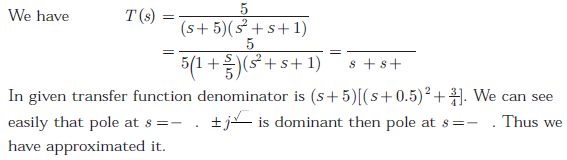
Q2. The transfer function of a plant is  The second-order approximation of T s using dominant pole concept is
The second-order approximation of T s using dominant pole concept is
The second-order approximation of T s using dominant pole concept is
Answer : Option D
Explaination / Solution:
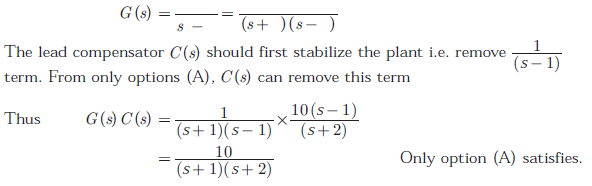
Q3. The open-loop transfer function of a plant is given as  If the plant is
operated in a unity feedback configuration, then the lead compensator that an
stabilize this control system is
If the plant is
operated in a unity feedback configuration, then the lead compensator that an
stabilize this control system is
If the plant is
operated in a unity feedback configuration, then the lead compensator that an
stabilize this control system is
Answer : Option A
Explaination / Solution:
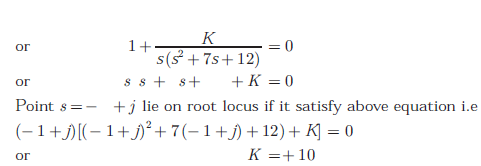
Q4. A unity feedback control system has an open-loop transfer function  . The gain K for which s = +j will lie on the root locus of this system is
. The gain K for which s = +j will lie on the root locus of this system is
. The gain K for which s = +j will lie on the root locus of this system is
Answer : Option D
Explaination / Solution:
Q5. The state space representation of a separately excited DC servo motor dynamics
is given as
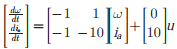
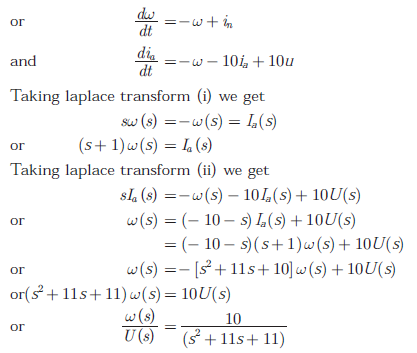
where ω is the speed of the motor, ia is the armature current and u is the
armature voltage. The transfer function ω(s)/U(s) of the motor is
Answer : Option D
Explaination / Solution:

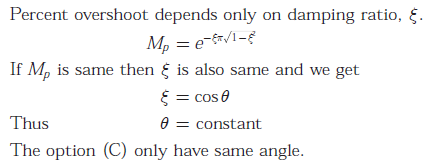
Q6. The pole-zero given below correspond to a
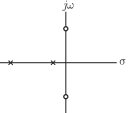
Answer : Option C
Explaination / Solution:
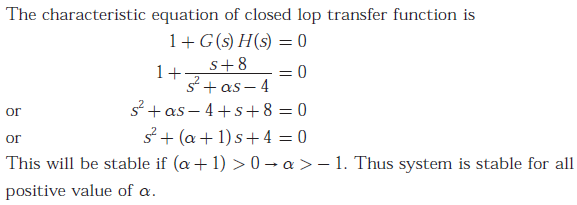
Q7. A certain system has transfer function 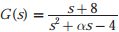 where α is a parameter. Consider the standard negative unity feedback
configuration as shown below
where α is a parameter. Consider the standard negative unity feedback
configuration as shown below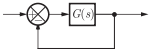
where α is a parameter. Consider the standard negative unity feedback
configuration as shown belowWhich of the following statements is true?
Answer : Option C
Explaination / Solution:
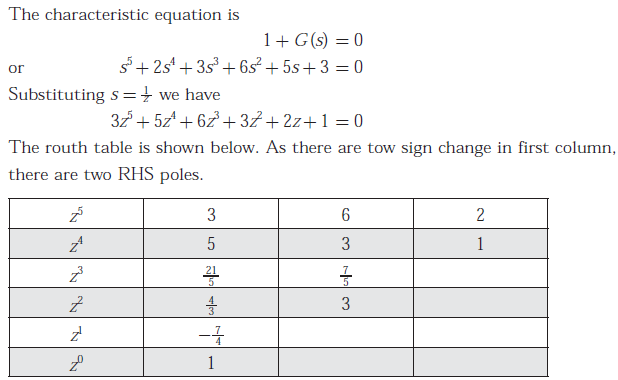
Q8. The number of open right half plane of  is
is
is
Answer : Option C
Explaination / Solution:
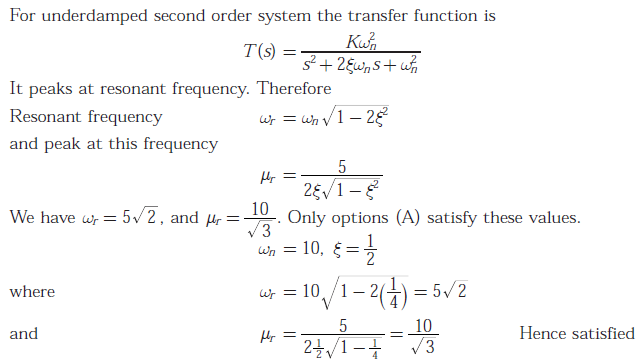
Q9.
The magnitude of frequency responses of an underdamped second order system is 5 at 0 rad/sec and peaks to 10/√3 at 5√2 rad/sec. The transfer function of the system is
Answer : Option C
Explaination / Solution:
Q10. The magnitude plot of a rational transfer function G(s) with real coefficients is shown below. Which of the following compensators has such a magnitude plot ?
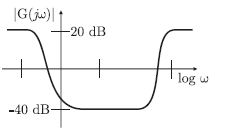
Answer : Option C
Explaination / Solution:
This compensator is roughly equivalent to combining lead and lad compensators in the same design and it is referred also as PID compensator.