Control Systems - Online Test
Q1. A plant transfer function is given as  When the plant operates in a unity feedback configuration, the condition for the stability of the closed loop system is
When the plant operates in a unity feedback configuration, the condition for the stability of the closed loop system is
When the plant operates in a unity feedback configuration, the condition for the stability of the closed loop system is
Answer : Option A
Explaination / Solution:
Given plant transfer function,
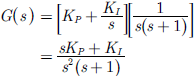


So, closed loop transfer function is
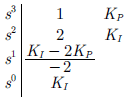
Therefore, characteristics equation is
For stability, we form the Routh array.
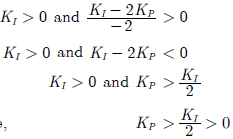
For stability, we must have
Q2. 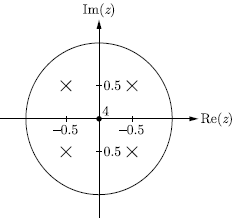
The pole-zero diagram of a causal and stable discrete-time system is shown in the figure. The zero at the origin has multiplicity 4. The impulse response of the system is h[n]. If h[0] = 1, we can conclude
Answer : Option A
Explaination / Solution:
From the pole-zero plot, we obtain the transfer function as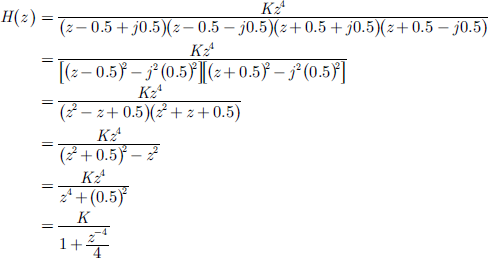
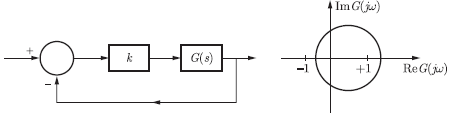
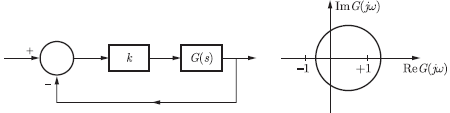
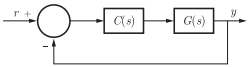
Q3. Consider the feedback system shown in the figure. The Nyquist plot of G (s) is
also shown. Which one of the following conclusions is correct ?
Answer : Option D
Explaination / Solution:
Given the feedback system and the Nyquist plot of G (s)is
For the given system, we have the open loop transfer function as
G (s) = KG (s)
Considering the open loop system G (s) is stable, we have no open loop poles in
right half plane
P = 0
From Nyquist theorem, we know that
N = P - Z
Where N is the number of encirclements of (-1 + j0), P is number of open loop
poles in right half plane, Z is number of closed loop poles in right half plane. For
stability, we must have
Z = 0
N = 0, if closed loop system is stable
N ≠ 0, if closed loop system is unstable
observing the Nyquist plot, we conclude that the plot of KG(s) encircles (-1 + j0)
if K> 1
Hence, N ≠ 0 for sufficient large and positive value of K . Thus, the closedsystem
is unstable for sufficiently large and positive K .
Q4. The feedback configuration and the pole-zero locations of 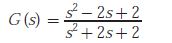 are shown below. The root locus for negative values of k , i.e. for -3 < k < 0, has breakaway/break-in points and angle of departure at pole P (with respect to the
are shown below. The root locus for negative values of k , i.e. for -3 < k < 0, has breakaway/break-in points and angle of departure at pole P (with respect to the
positive real axis) equal to
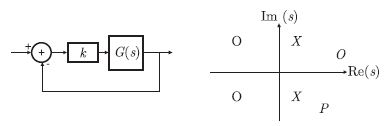
are shown below. The root locus for negative values of k , i.e. for -3 < k < 0, has breakaway/break-in points and angle of departure at pole P (with respect to thepositive real axis) equal to
Answer : Option B
Explaination / Solution:
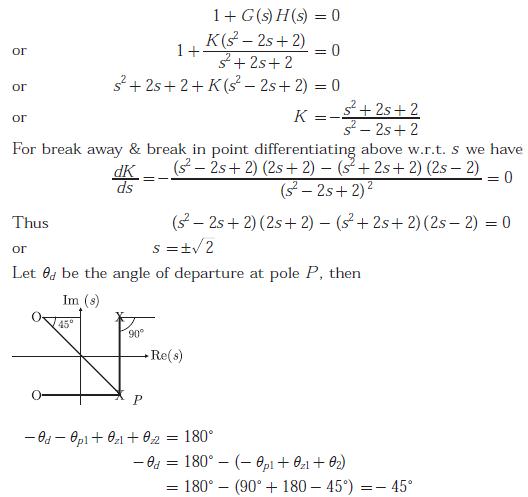
The characteristic equation is
Q5. An LTI system having transfer function  and input x(t) = sin(t + 1) is in steady state. The output is sampled at a rate ws rad/s to obtain the final output {x(k)}. Which of the following is true ?
and input x(t) = sin(t + 1) is in steady state. The output is sampled at a rate ws rad/s to obtain the final output {x(k)}. Which of the following is true ?
and input x(t) = sin(t + 1) is in steady state. The output is sampled at a rate ws rad/s to obtain the final output {x(k)}. Which of the following is true ?
Answer : Option A
Explaination / Solution:
No Explaination.
Q6. The unit step response of an under-damped second order system has steady state value of -2. Which one of the following transfer functions has theses properties ?
Answer : Option B
Explaination / Solution:
For under-damped second order response

Q7. For the following feedback system 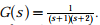 The 2% settling time of the
step response is required to be less than 2 seconds.
The 2% settling time of the
step response is required to be less than 2 seconds.
The 2% settling time of the
step response is required to be less than 2 seconds.
Answer : Option C
Explaination / Solution:
No Explaination.
Q8. 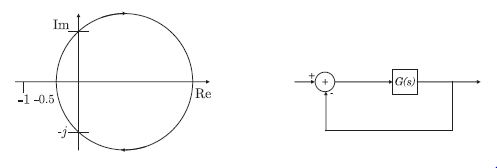
The Nyquist plot of a stable transfer function G(s) is shown in the figure are interested in the stability of the closed loop system in the feedback configuration shown.
Which of the following statements is true ?
Answer : Option B
Explaination / Solution:
The plot has one encirclement of origin in clockwise direction. Thus G(s) has a zero is in RHP.
Q9. 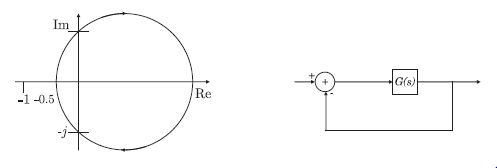
The Nyquist plot of a stable transfer function G(s) is shown in the figure are interested in the stability of the closed loop system in the feedback configuration shown.
The gain and phase margins of G(s) for closed loop stability are
Answer : Option C
Explaination / Solution:
The Nyzuist plot intersect the real axis ate - 0.5. Thus
G. M. =- 20 log x =- 20 log 0.5 = 6.020 dB
And its phase margin is 90◦c
Q10. The Bode plot of a transfer function G(s) h is shown in the figure below.
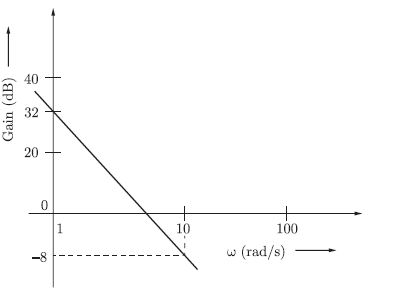
The gain (20 log ƖG(S)Ɩ) is 32 dB and -8 dB at 1 rad/s and 10 rad/s respectively The phase is negative for all ω Then G(S) is
Answer : Option B
Explaination / Solution:
From the given plot, we obtain the slope as