EC GATE 2007 - Online Test
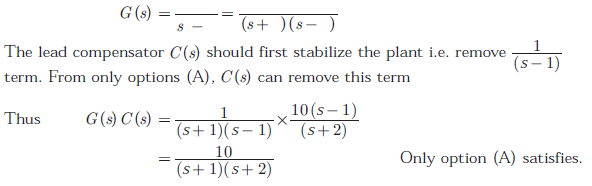
Q1. The open-loop transfer function of a plant is given as  If the plant is
operated in a unity feedback configuration, then the lead compensator that an
stabilize this control system is
If the plant is
operated in a unity feedback configuration, then the lead compensator that an
stabilize this control system is
If the plant is
operated in a unity feedback configuration, then the lead compensator that an
stabilize this control system is
Answer : Option A
Explaination / Solution:
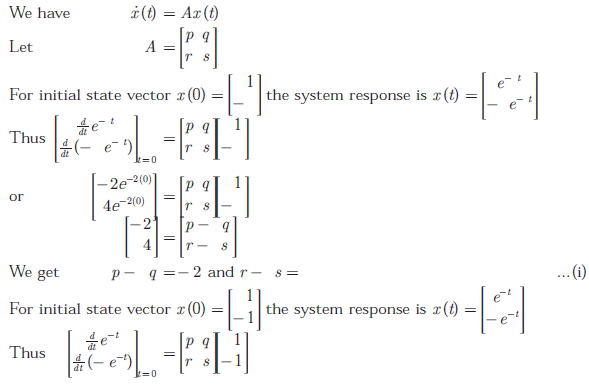
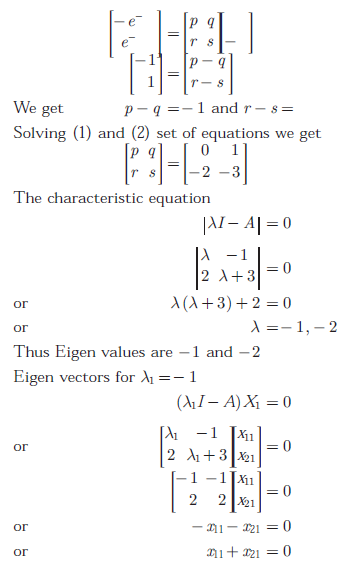
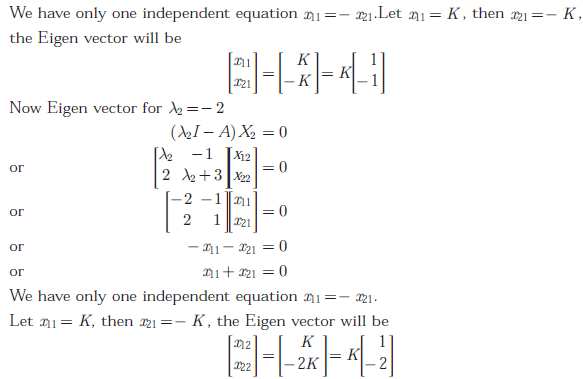
Q2. Consider a linear system whose state space representation is x(t) = Ax(t). If the initial state vector of the system is  then the system response is
then the system response is  If the itial state vector of the system changes to the system response becomes
If the itial state vector of the system changes to the system response becomes 
then the system response is If the itial state vector of the system changes to the system response becomes The eigenvalue and eigenvector pairs (λivi)for the system are
Answer : Option A
Explaination / Solution:
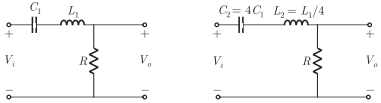
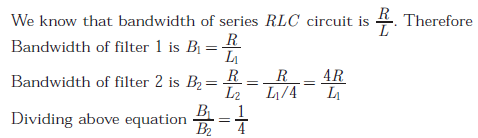
Q3. Two series resonant filters are as shown in the figure. Let the 3-dB bandwidth
of Filter 1 be B1 and that of Filter 2 be B2. the value B1/B2 is
Answer : Option D
Explaination / Solution:
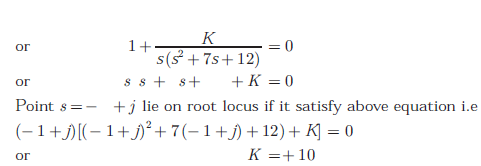
Q4. A unity feedback control system has an open-loop transfer function  . The gain K for which s = +j will lie on the root locus of this system is
. The gain K for which s = +j will lie on the root locus of this system is
. The gain K for which s = +j will lie on the root locus of this system is
Answer : Option D
Explaination / Solution:
Q5.
Consider a linear system whose state space representation is x(t) = Ax(t). If the initial state vector of the system is then the system response is If the itial state vector of the system changes to the system response becomes
then the system response is If the itial state vector of the system changes to the system response becomes The system matrix A is
Answer : Option D
Explaination / Solution:
No Explaination.
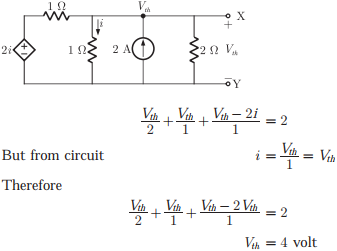
Q6. 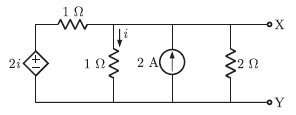
For the circuit shown in the figure, the Thevenin voltage and resistance looking into X − Y are
Answer : Option D
Explaination / Solution:
Here Vth is voltage across node also. Applying nodal analysis we get
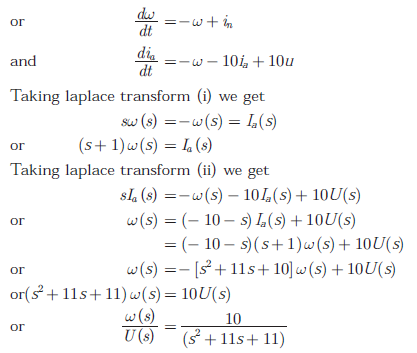
Q7. The state space representation of a separately excited DC servo motor dynamics
is given as
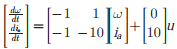
where ω is the speed of the motor, ia is the armature current and u is the
armature voltage. The transfer function ω(s)/U(s) of the motor is
Answer : Option D
Explaination / Solution:

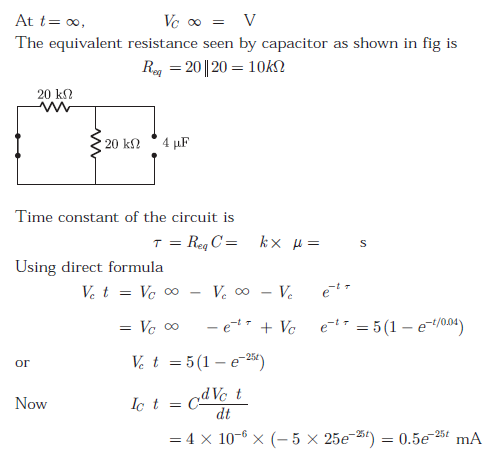
Q8. In the circuit shown, vC is 0 volts at t = 0 sec. For t > 0, the capacitor current iC(t), where t is in seconds is given by
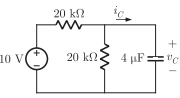
Answer : Option A
Explaination / Solution:

Q9. If E denotes expectation, the variance of a random variable X is given by
Answer : Option A
Explaination / Solution:
The variance of a random variable x is given by
E X − E X
Q10. In the ac network shown in the figure, the phasor voltage VA (in Volts) is
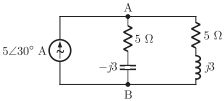
Answer : Option D
Explaination / Solution: