EE GATE 2017 PAPER 01 - Online Test
Q1. A 3-bus power system is shown in the figure below, where the diagonal elements of Y-bus
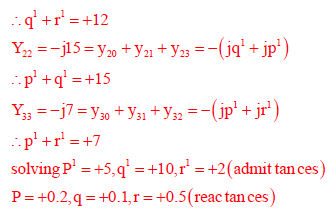
matrix are Y11 = -j12pu, Y22 = -j15pu and Y33 = -j7pu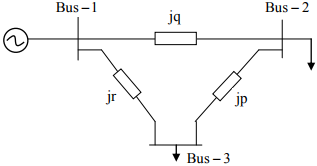
The per unit values of the line reactances p, q and r shown in the figure are
Answer : Option B
Explaination / Solution:

Q2. The bus admittance matrix for a power system network is 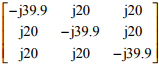 pu
pu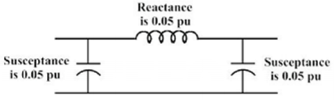
puThere is a transmission line, connected between buses 1 and 3, which is represented by the
circuit shown in figure.
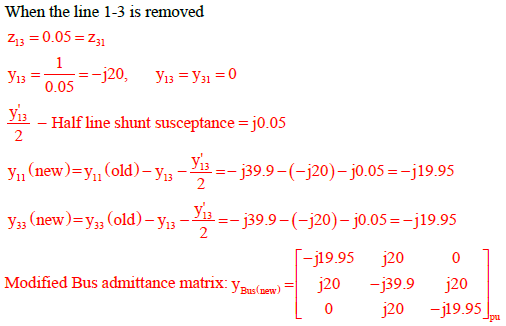
If this transmission line is removed from service, What is the modified bus admittance matrix?
Answer : Option C
Explaination / Solution:
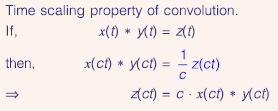
Q3. Let z(t) = x(t) * y(t), where "*" denotes convolution. Let C be a positive real-valued constant. Choose the correct expression for z (ct).
Answer : Option A
Explaination / Solution:
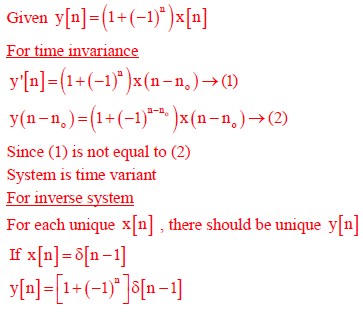
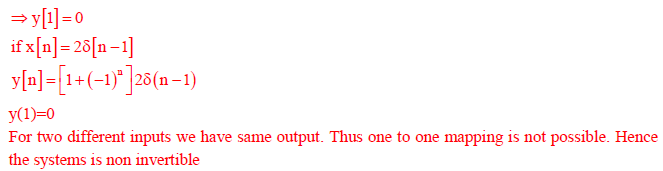
Q4. Consider the system with following input-output relation where, x[n] is the input and y[n] is the output. The system is
where, x[n] is the input and y[n] is the output. The system is
where, x[n] is the input and y[n] is the output. The system is
Answer : Option D
Explaination / Solution:
Q5. 
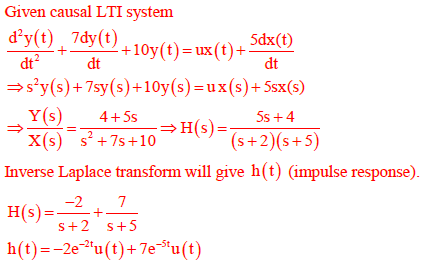
Let a causal LTI system be characterized by the following differential equation, with initial rest condition
Where x(t) and y(t) are the input and output respectively. The impulse response of the system is (u(t) is the unit step function)
Answer : Option B
Explaination / Solution:
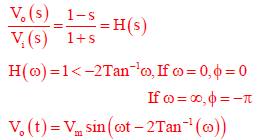
Q6. The transfer function of a system is given by,  Let the output of the system be v0(t) = Vm sin(ωt + φ) for the input vi(t) = Vm sin(ωt). Then the minimum and maximum values of φ (in radians) are respectively
Let the output of the system be v0(t) = Vm sin(ωt + φ) for the input vi(t) = Vm sin(ωt). Then the minimum and maximum values of φ (in radians) are respectively
Let the output of the system be v0(t) = Vm sin(ωt + φ) for the input vi(t) = Vm sin(ωt). Then the minimum and maximum values of φ (in radians) are respectively
Answer : Option D
Explaination / Solution:
Q7. Let the signal 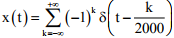 be passed through an LTI system with frequency
response H(𝜔), as given in the figure below
be passed through an LTI system with frequency
response H(𝜔), as given in the figure below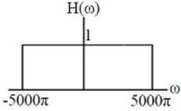
be passed through an LTI system with frequency
response H(𝜔), as given in the figure belowThe Fourier series representation of the output is given as
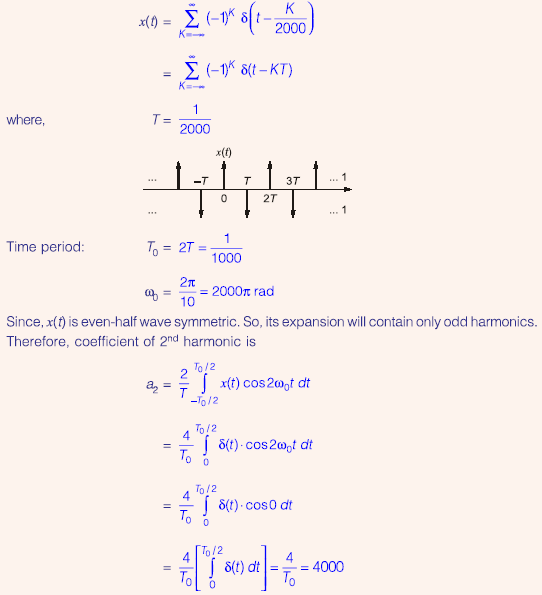
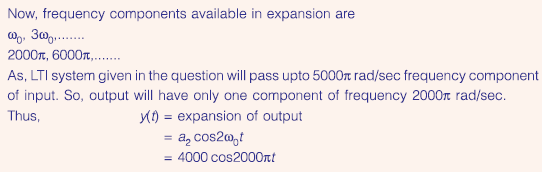
Answer : Option C
Explaination / Solution:
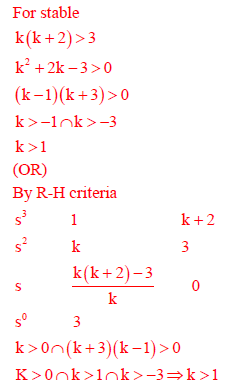
Q8. A closed loop system has the characteristic equation given by s3 + Ks2 +(K + 2)s + 3 = 0 For
this system to be stable, which one of the following conditions should be satisfied?
Answer : Option D
Explaination / Solution:

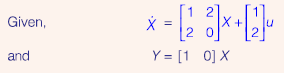
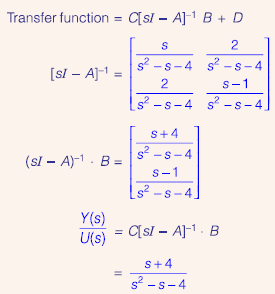
Q9. The transfer function of the system Y(s)/U(s) whose state-space equations are given below is:
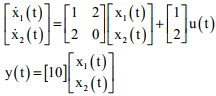
Answer : Option D
Explaination / Solution:
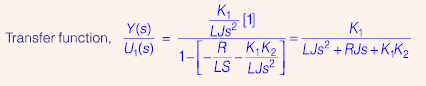
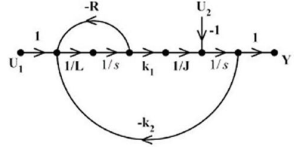
Q10. In the system whose signal flow graph is shown in the figure, U1(s) and U2(s) are inputs. The
transfer function Y(s)/U1(s) is
Answer : Option A
Explaination / Solution: